TAFLab
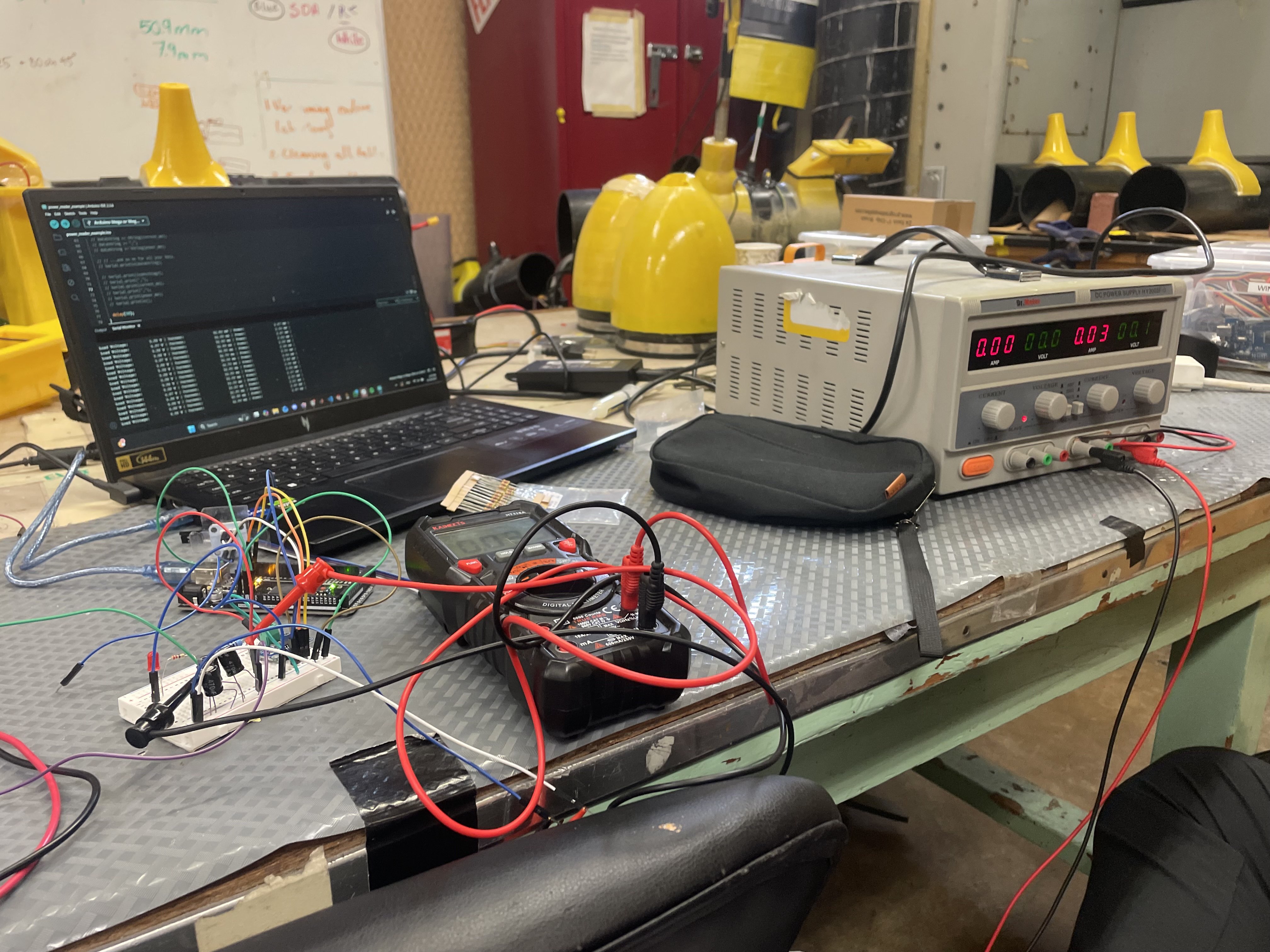
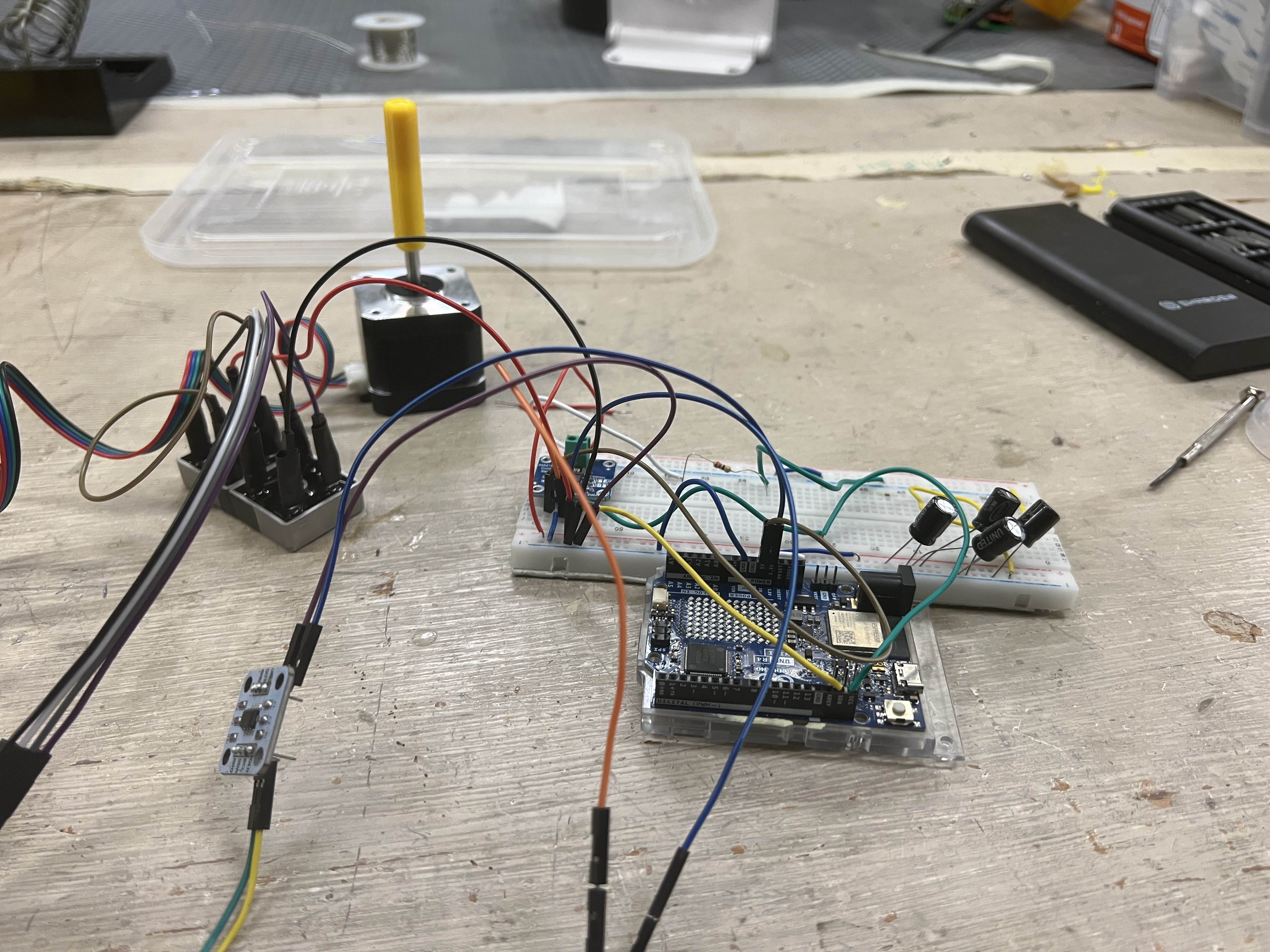
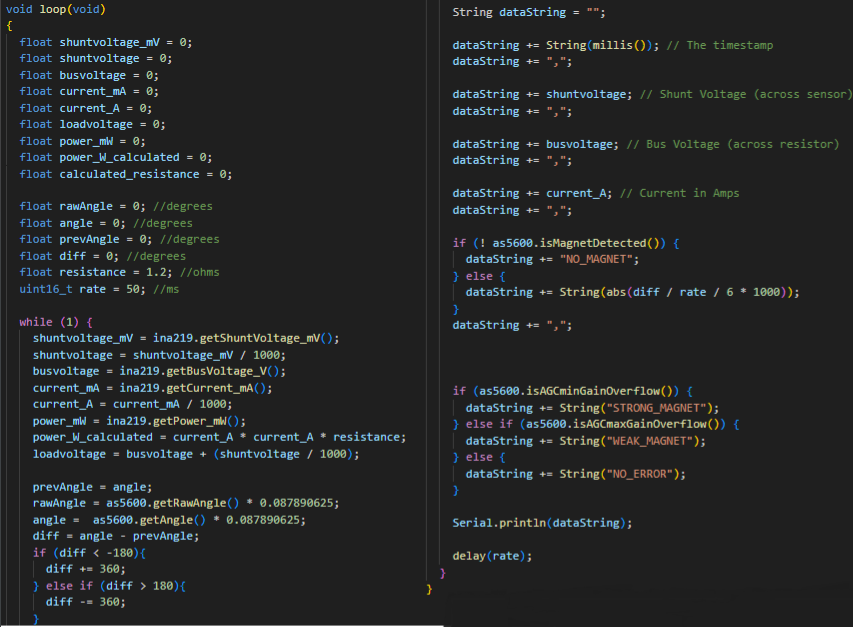
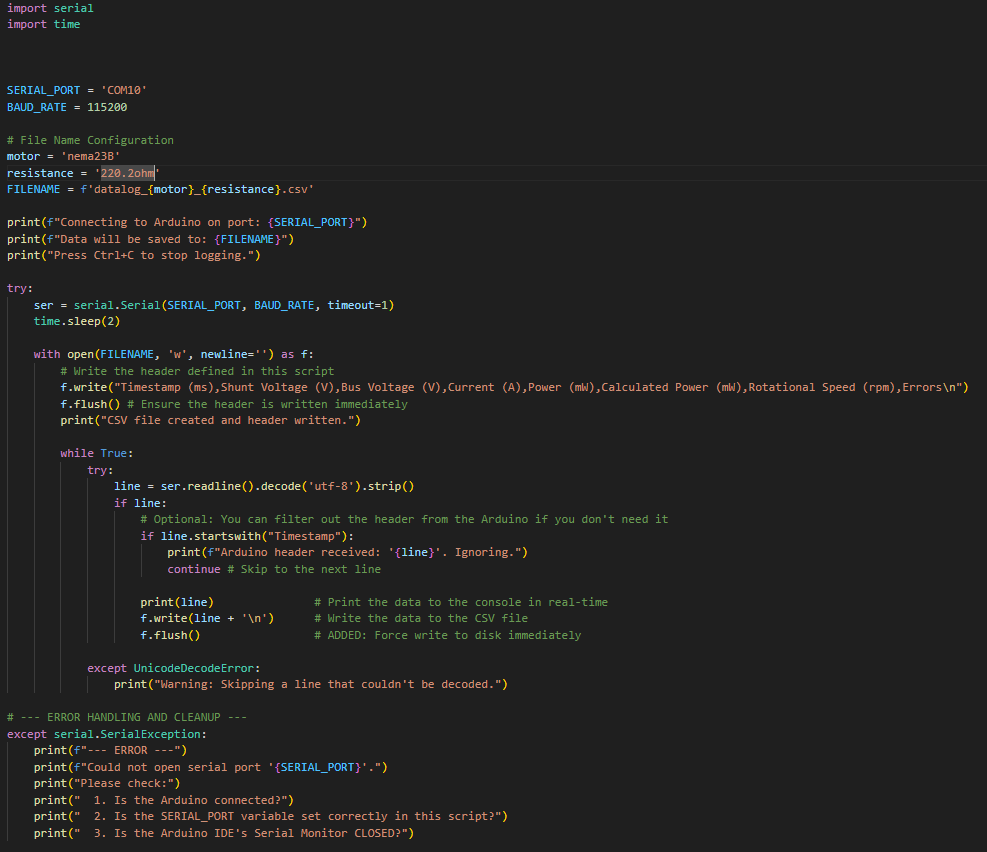
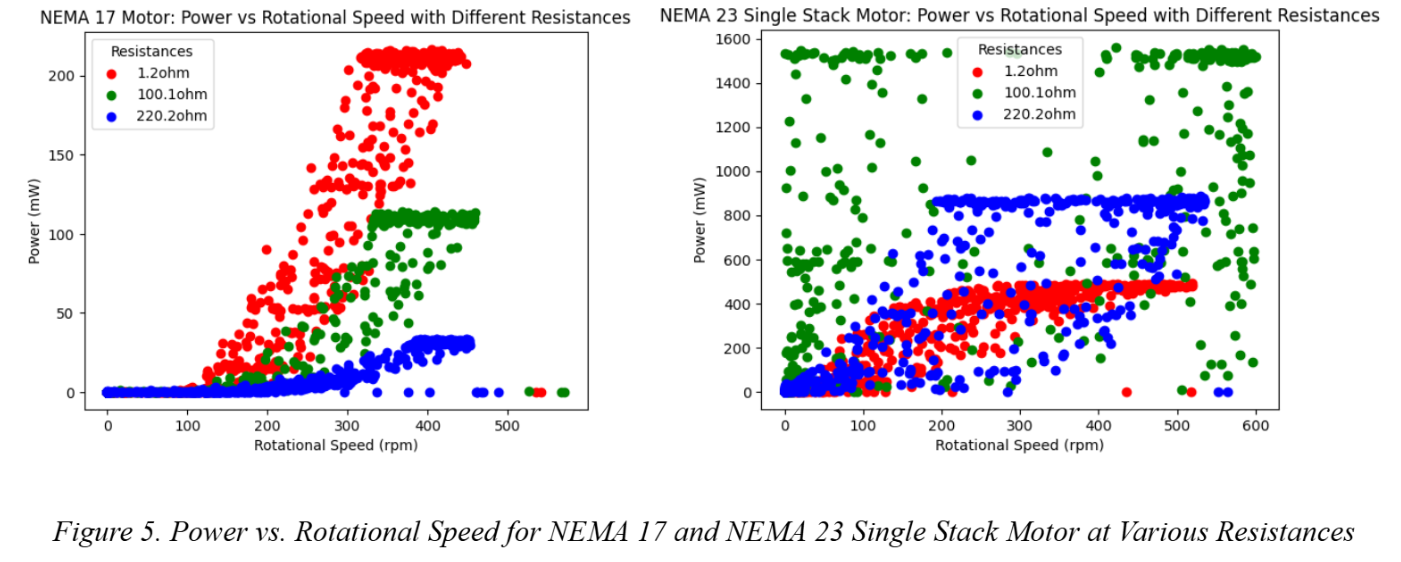
During the Fall 2025 semester, I served as an Undergraduate Researcher at the TAFLab under the supervision of Reza Alem and Arsh Khan. My research focused on the characterization of micro-wind generators, specifically establishing a testing framework to evaluate the efficiency of small-scale turbine generators. I conducted a comparative analysis of different motor topologies, including NEMA 17 and NEMA 23 stepper motors, to determine their viability for power generation. To isolate performance from wind variability, I utilized a high-torque drill to simulate consistent input speeds while measuring outputs. I designed and fabricated a custom rectification circuit to convert AC motor output into stable DC power, employing full-bridge rectifiers and smoothing capacitors. To capture data, I developed a Python-based Data Acquisition (DAQ) pipeline that interfaced with an Arduino microcontroller and an INA219 power sensor via I2C. Through rigorous sensor validation, I discovered a 53.097% inaccuracy in voltage readings due to signal noise, which led me to pivot to a current-squared power calculation (P = I^2R) using a known resistive load to ensure data fidelity. My findings highlighted the critical role of impedance matching in maximizing power yield, with the NEMA 23 motor showing a peak output of ~1500mW. I concluded the semester by developing a 3-phase bridge rectifier to expand this framework to Brushless DC (BLDC) motors.
Skills Applied
Project Images