UR10e Simulation Project
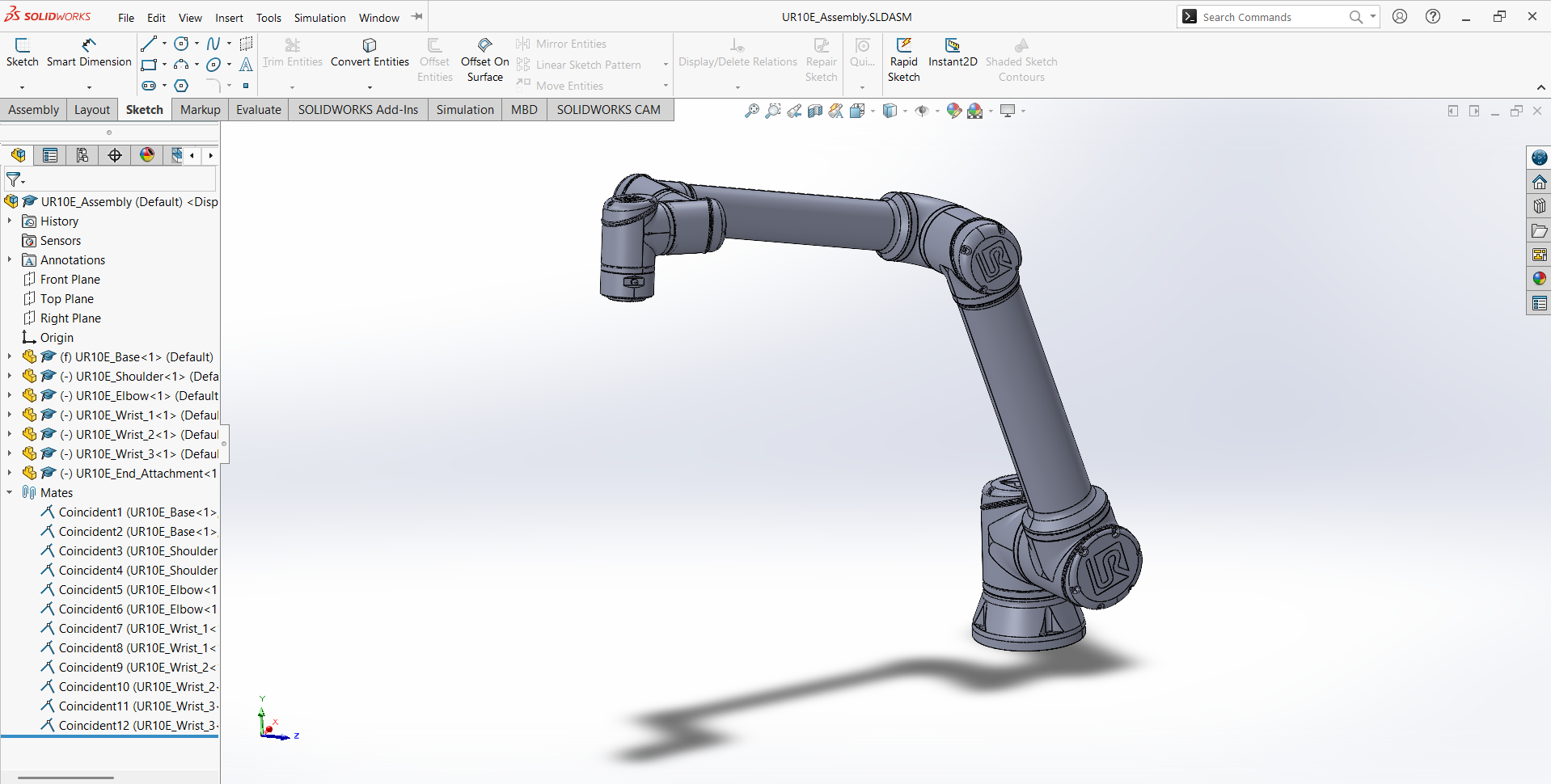
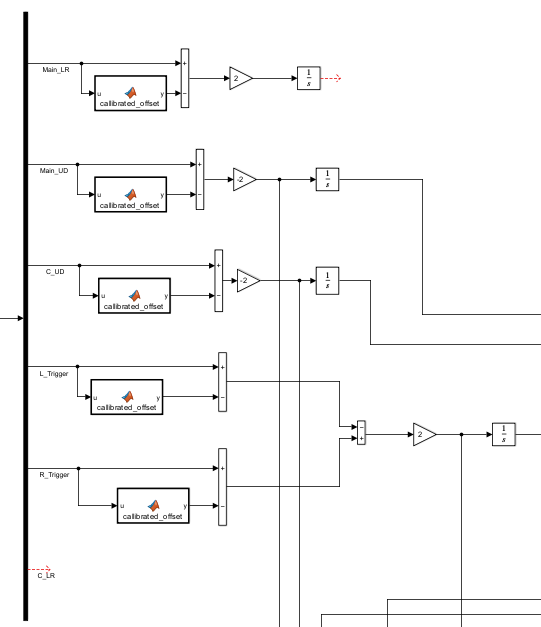
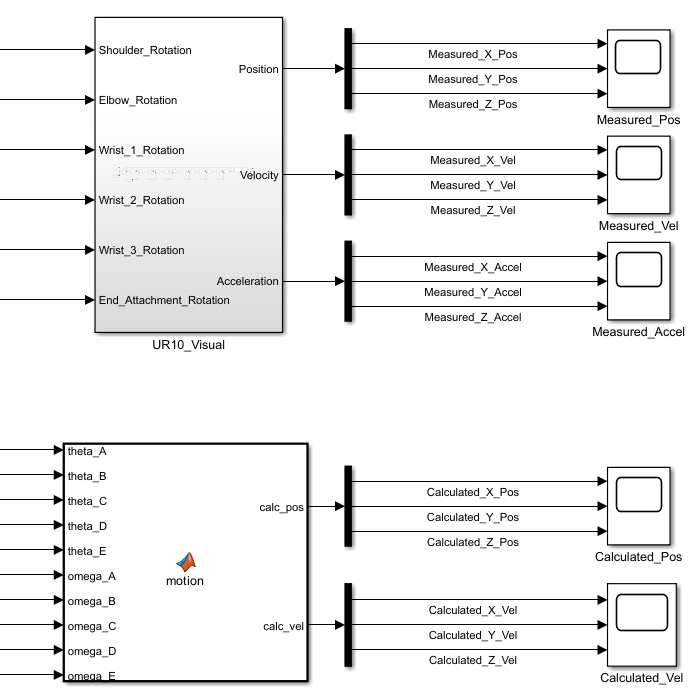
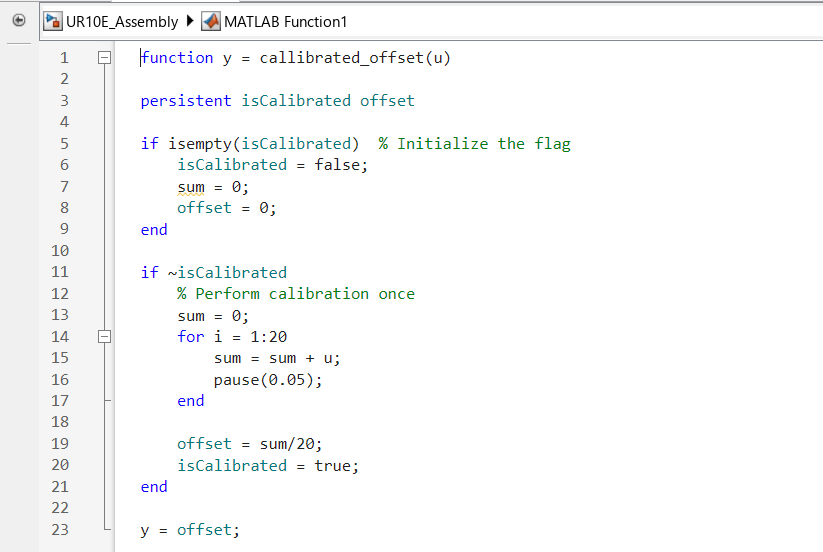
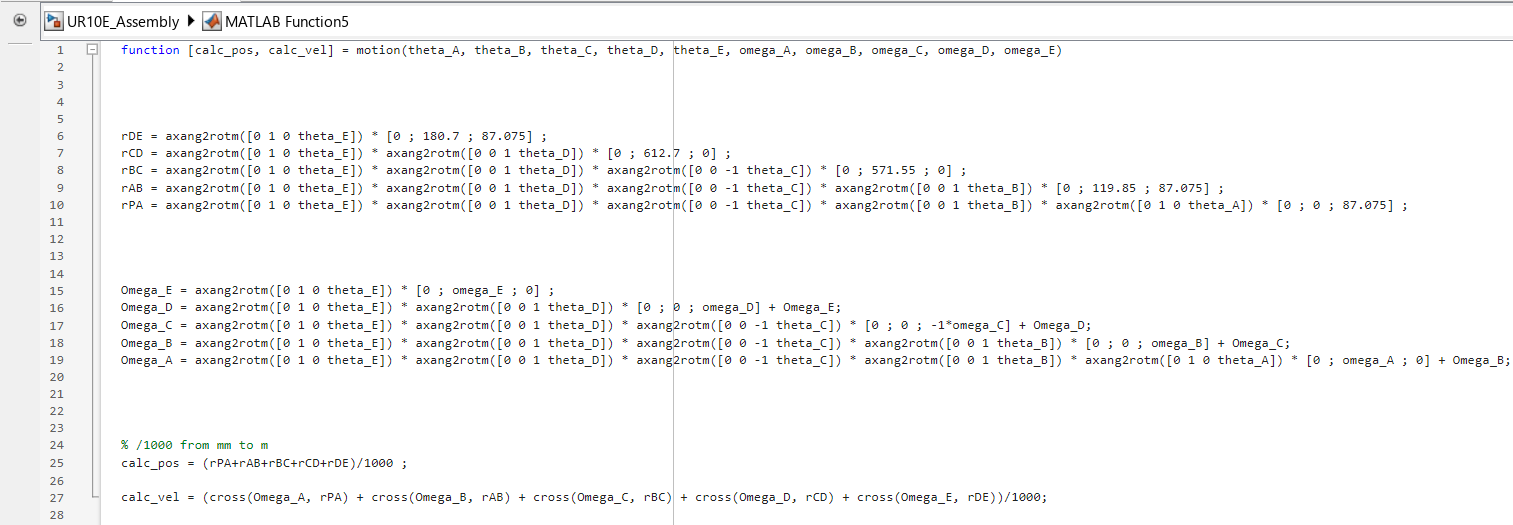
For a class project, I developed a 6-DOF robotic arm simulator of a UR10e industrial robot using MATLAB Simulink and Simscape Multibody. I imported a SolidWorks assembly of the arm into the simulation environment, defining physical mates and configuring port connections to actuate each individual rotational axis. To evaluate the system's motion, I applied rigid body dynamics to derive forward kinematic models, analytically calculating the position and velocity of the end effector. I then validated these analytical models by comparing my mathematical outputs directly against real-time spatial telemetry generated by Simscape. For interactive operation, I interfaced a GameCube controller using the Simulink VR Controller Input block. To ensure smooth and reliable control, I programmed custom deadzone filtering scripts to stabilize the analog inputs and accurately map them to joint-velocity commands.
Skills Applied
Project Images