FIRST Robotics Competition (Charged Up)
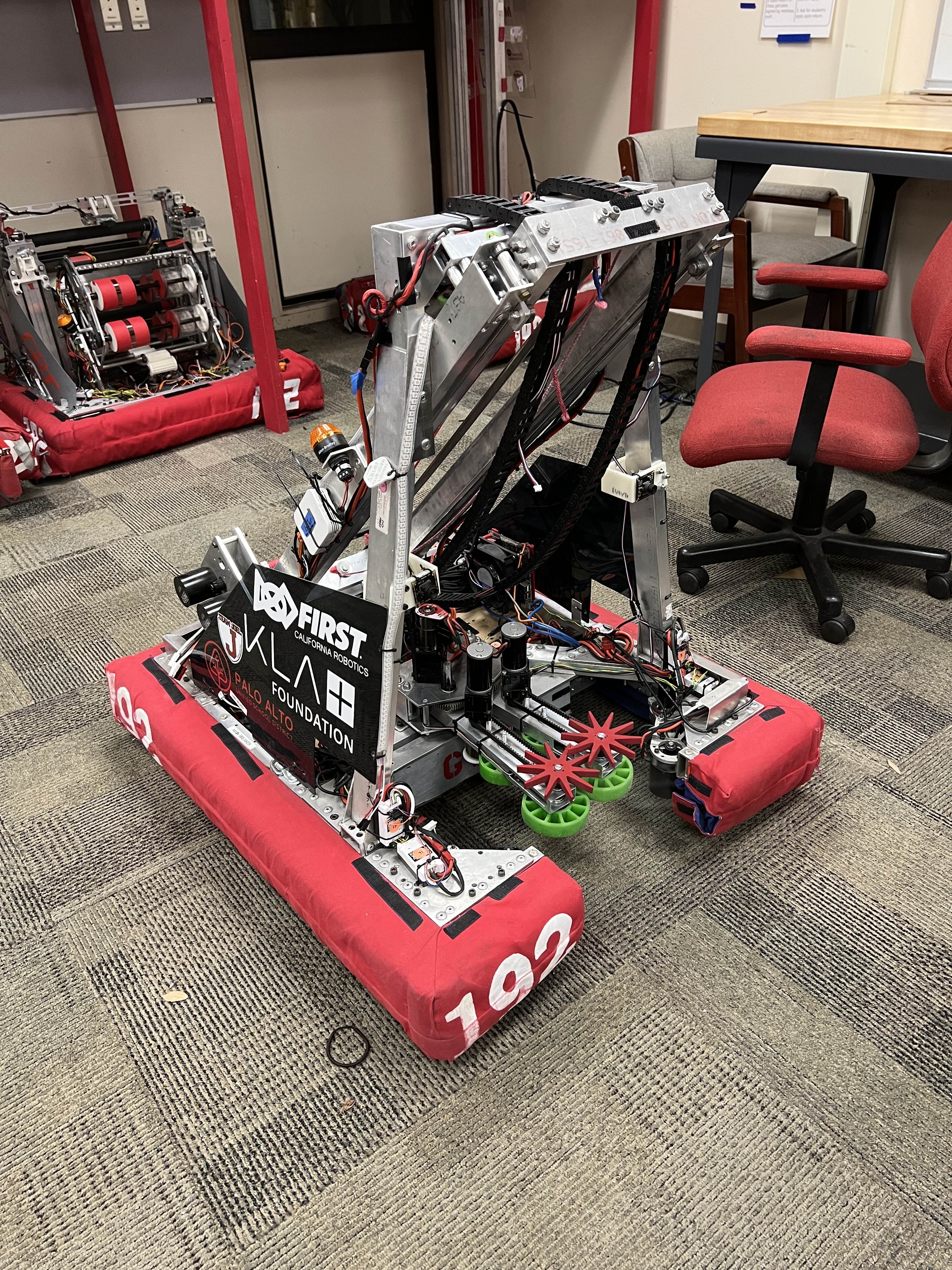
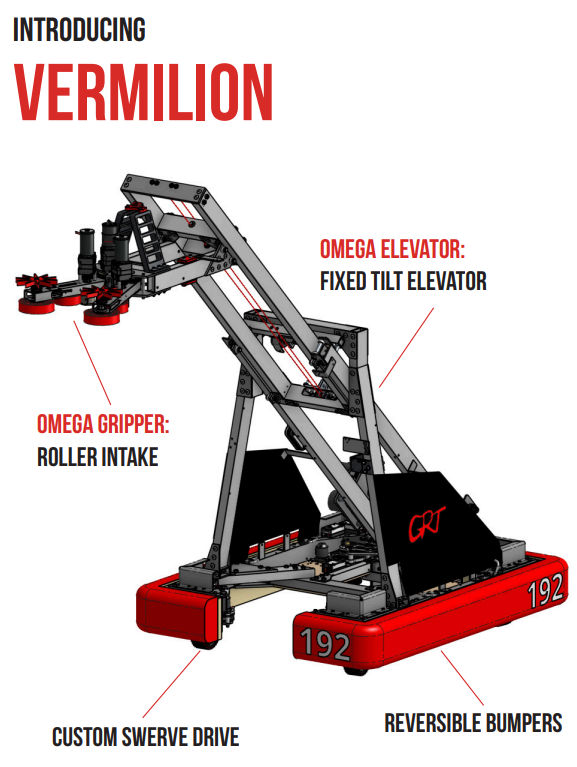
Leading a 10-member mechanical design team for the FIRST Robotics Competition, I engineered a versatile, small-profile roller intake gripper for our robot, Vermilion. Designed to rapidly acquire varying geometries and compressibilities—specifically rigid cones and soft cubes —the mechanism features an aluminum frame optimized for weight reduction through extensive pocketing and slotting. The intake architecture utilizes driven compliant wheels and compliant star rollers to aggressively funnel game pieces , while fixed back wheels provide grip stability. To optimize power efficiency and eliminate continuous motor stall during piece retention, I performed torque and clamping-force calculations to specify a 15-pound constant-force spring for the passive clamping system. Finally, I integrated an embedded color sensor for autonomous game piece detection alongside a seated camera to facilitate precise driver alignment.
Skills Applied
Project Images