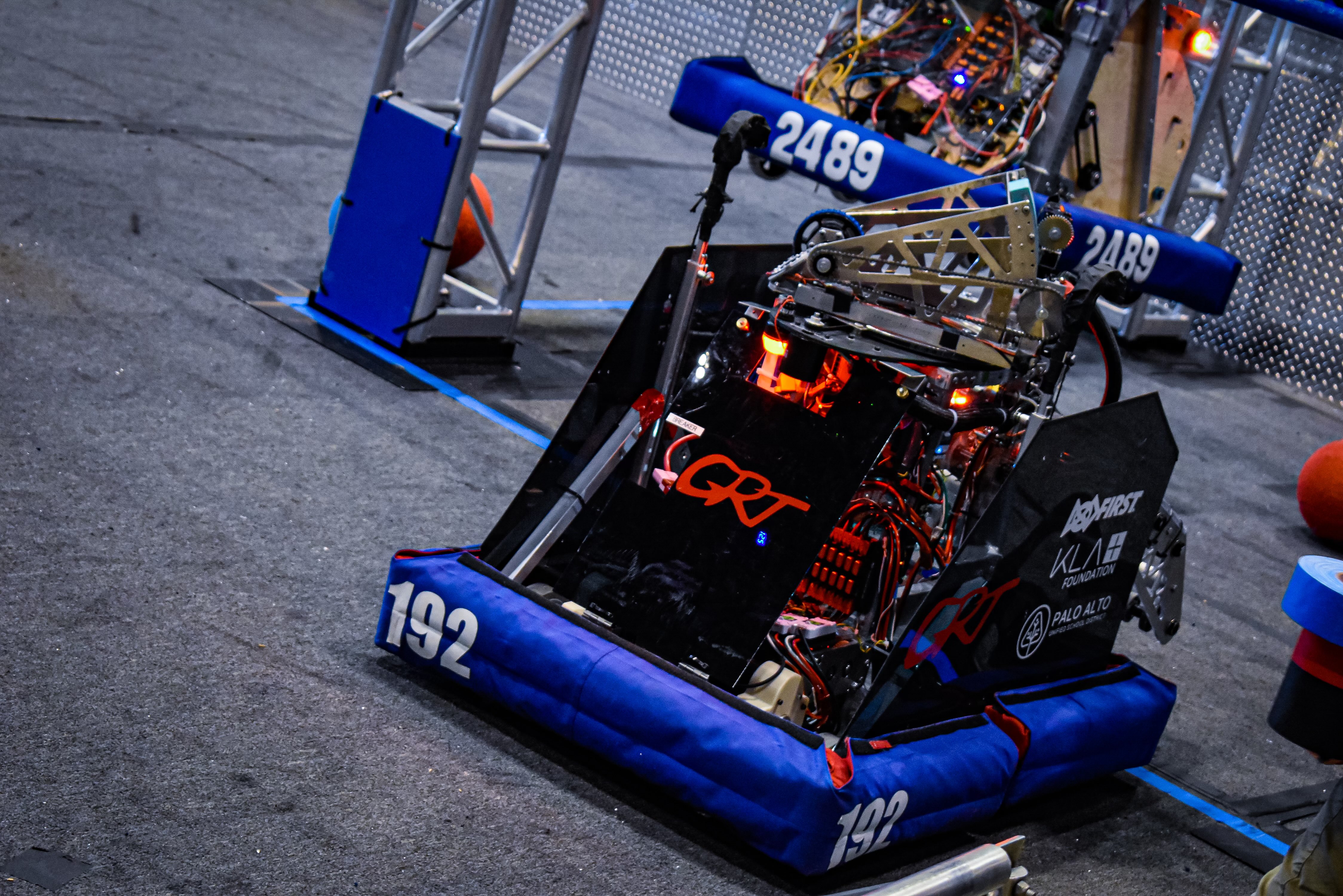
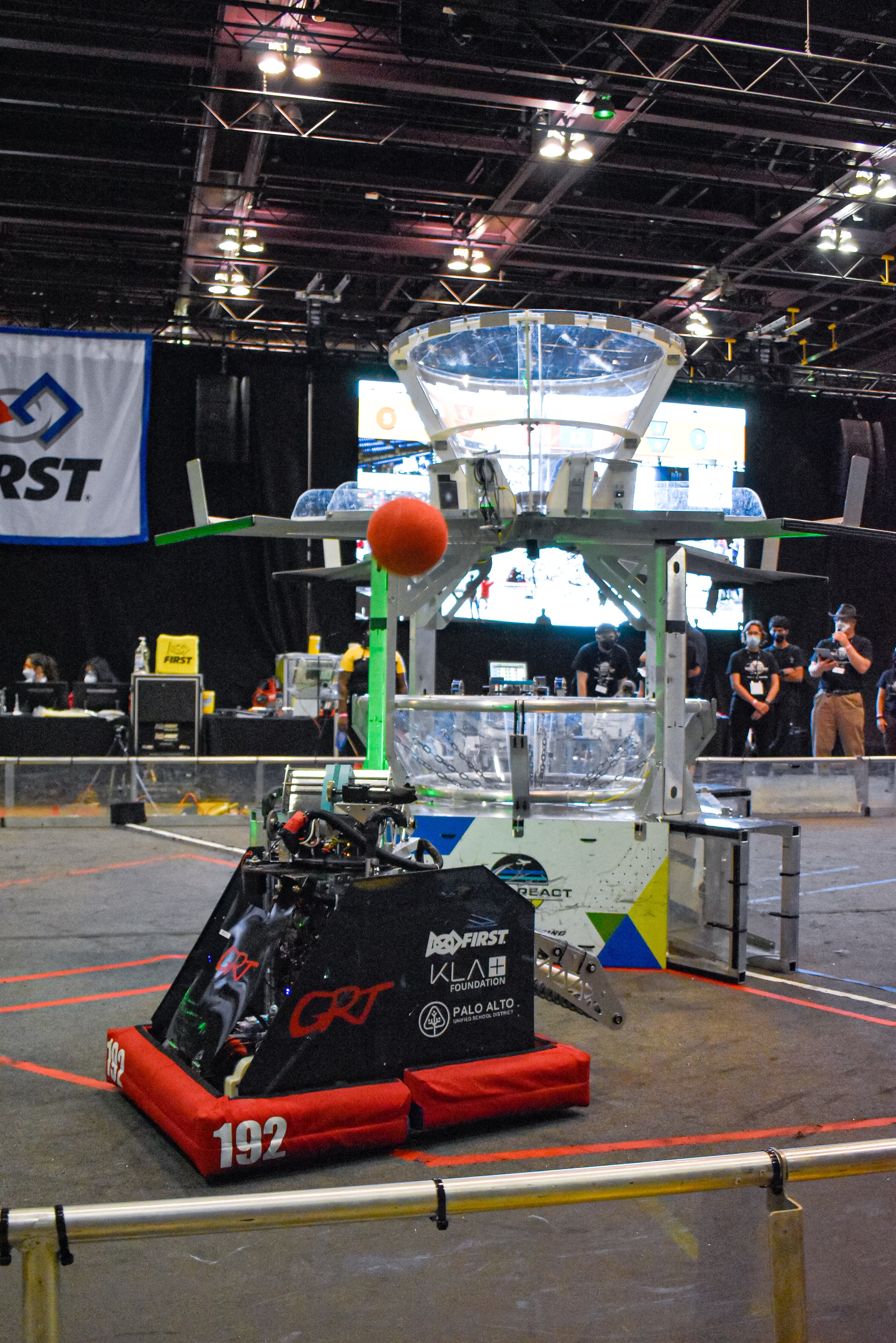
FIRST Robotics Competition (Rapid React)
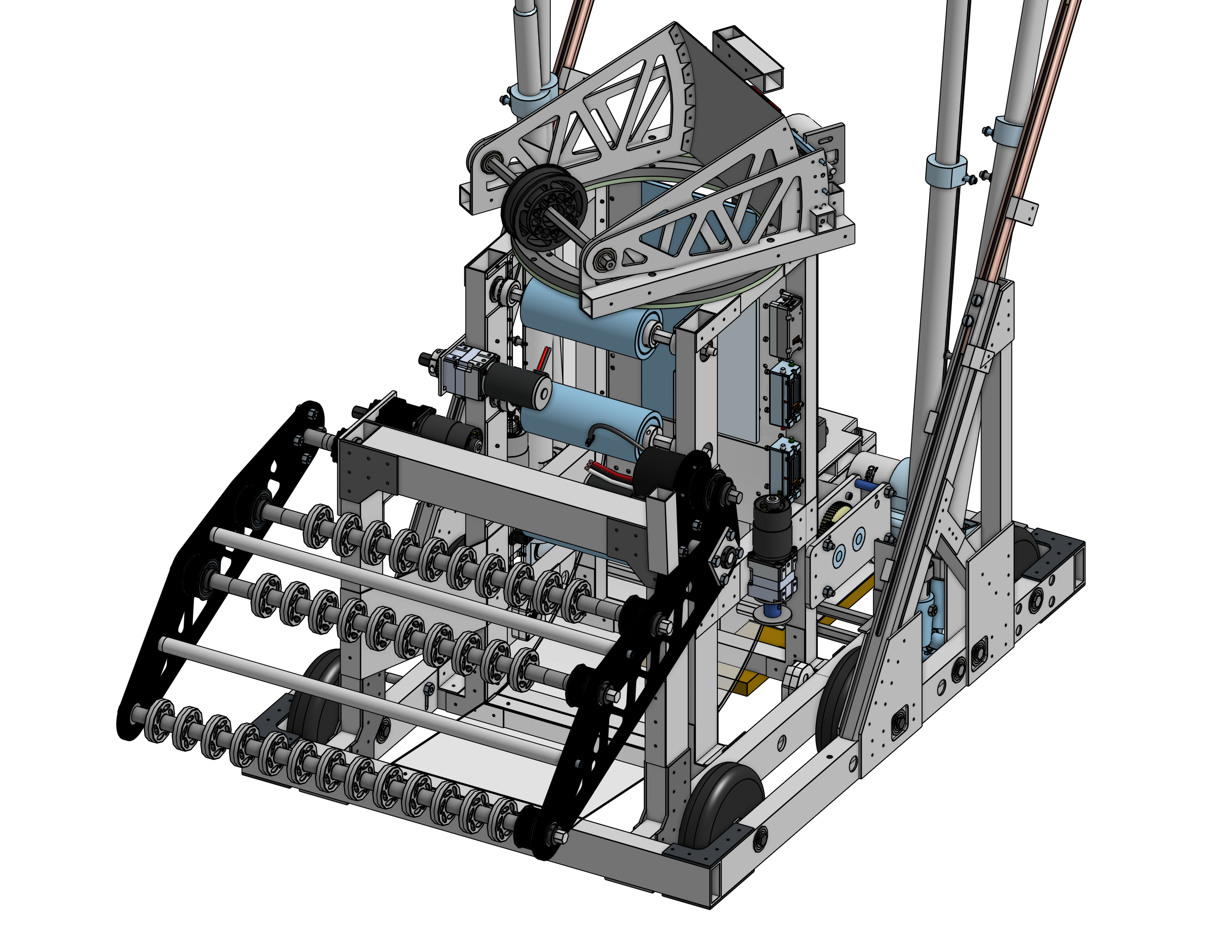
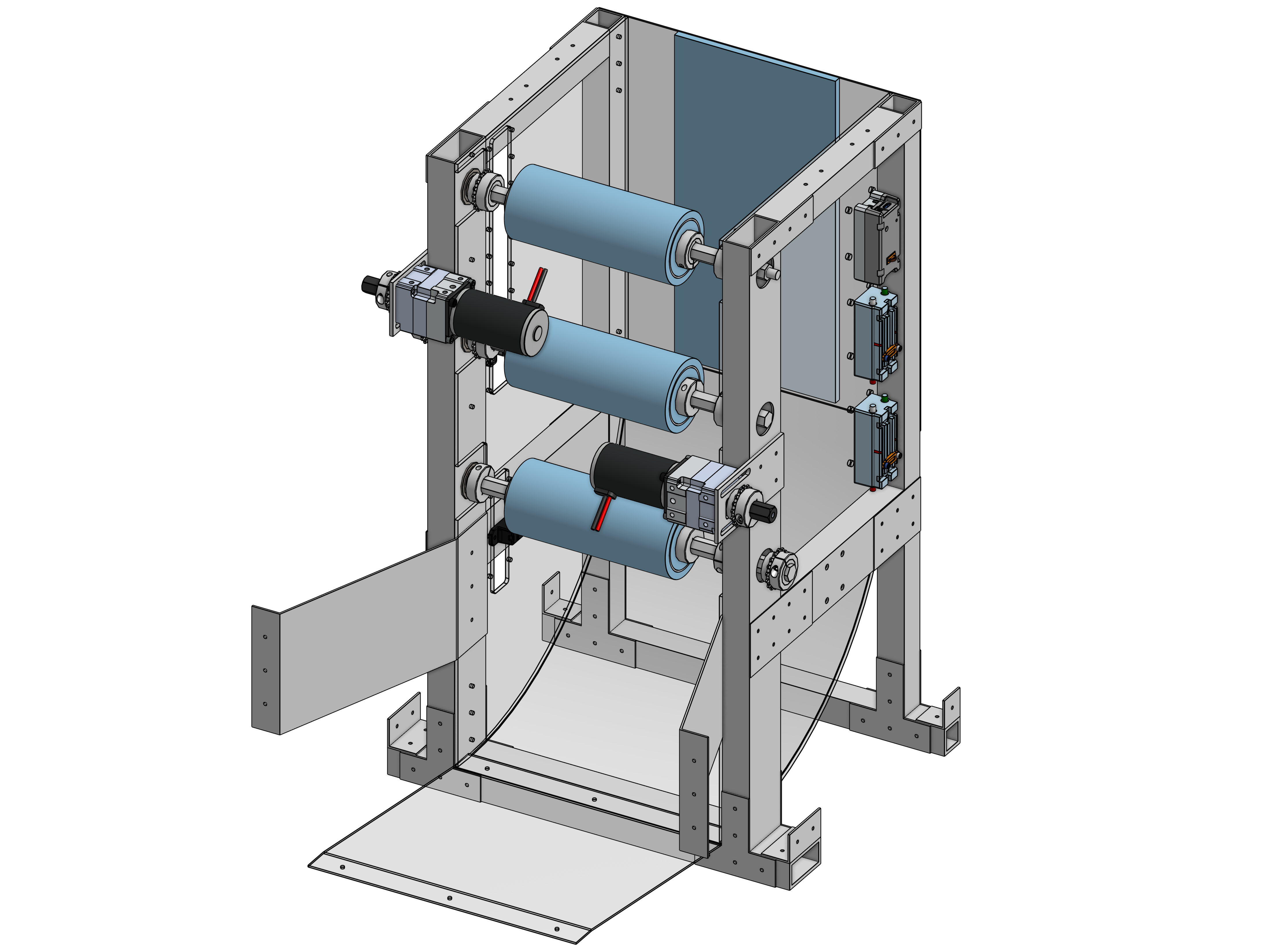
For the FIRST Robotics Competition robot, Daedalus, I led a 10-member design team in developing an asynchronous indexing subsystem to route and vertically feed spherical game pieces into a turret-style launcher. I designed the mechanical architecture using a rigid aluminum frame and low-friction polycarbonate walls, establishing a gravity-funnel intersection to efficiently transition game pieces from the wider intake. To maximize system throughput and feed consistency, I engineered custom roughtop rollers and iteratively calibrated the mechanical compression applied to the spheres. Furthermore, I developed a mechatronic tracking pipeline by integrating infrared and color sensors to detect the index location of incoming pieces. This sensor array interfaced with asynchronously and independently controlled rollers, allowing the subsystem to accurately differentiate, track, and isolate individual game pieces to ensure a jam-free feed sequence.
Skills Applied
Project Images